HROS Humanoid Endoskeleton
|
|
HROS Humanoid Endoskeleton Basic Data Category: Robotik URL (first publication): https://www.trossenrobotics.com/HR-OS1
Project status:
Technical documentation Maturity of the project:
no no
Other
Assembly instructions are editable: Bill of materials is editable: Design files are in original format: No Free redistribution is allowed licence: No
Project management
Open-o-meter: 0 Product category: Toys & Games Contains original non-electronic hardware: Contains original electronic hardware: Contains original software: |




Description
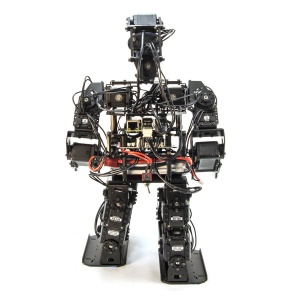
HR-OS1 Humanoid Endoskeleton
Intel has discontinued the Edison and the OS1 will no longer ship with this board.
Kit Contents
- 20 (Full Kit Only)
- Arbotix-Pro Robocontroller (CM-730 compatible)
- Raspberry Pi 2 CPU with SD card, Wifi Dongle and Bluetooth Dongle
- Playstation DS3 Sixaxis Bluetooth Gamepad Controller
- 3-cell 11.1v 2200 mAH LiPo Battery and Battery Monitor
- Lasercut Delrin Torso
- Assembly Hardware and Tools
- Power and Data Cables
Open Source
The hosts all of the and an ever growing community of developers expanding upon the . All code is released under GNU GPL v3 (unless another OS license is specified), and 3d physical models licensed under a Creative Commons Attribution-ShareAlike 4.0 International License
Onboard Linux Computer
The HR-OS1 was designed for flexibility and comes with multiple options for an onboard Linux computer. The kit is currently being shipped with and is compatible with the Raspberry Pi 2. ODROID and Minnowboard Max support are currently being tested.
Raspberry Pi 2 The next-generation Raspberry Pi 2 features a Broadcom BCM2836 SoC, with a quad-core ARM Cortex-A7 CPU and a VideoCore IV dual-core GPU; 1 GB of RAM with remaining specifications being similar to those of the previous generation model B+. Our Raspberry Pi 2 kits ship with a pre-flashed SD card (flashed with a custom Raspbian Linux distribution) as well as wifi and bluetooth dongles.
Subcontroller
The HR-OS1 uses the Arbotix-Pro subcontroller for DYNAMIXEL actuator communication and sensor input. This custom board from InterbotiX Labs boasts a 32-bit ARM Cortex-M3 72mhz CPU and is packed with features like sixteen 12-bit analog inputs/GPIO, ACC/Gyro 6-axis IMU, DYNAMIXEL power control with TTL and RS-485 communication options, Xbee/TTL/USB serial communication, battery voltage monitoring and speaker output.
Software
The HR-OS1-Framework, based on the open-source DARwin-OP framework from ROBOTIS and Virginia Tech University, is being actively developed by Trossen Robotics and the Trossen Robotics Community. We will continue to refine and expand this software, providing multiple control interface solutions. This includes a node.js based API so that the robot can be connected to ROS and the Intel XDK for cross-platform application development. Users will also be able to build programs and apps from many different languages to deploy and share on tablets, smartphones and more. The goal of the API is to easily expose higher level functions of the robots so that developers can bring the robots to life without having an in depth knowledge of more advanced lower level functions that make the robot move and walk.
The HR-OS1-Framework is being developed and tested on Ubuntu, Raspbian and OpenEmbedded operating systems. Like the HR-OS1 hardware, all of the software will be available completely open-source and available for anyone to download.
AX-12A DYNAMIXEL Actuators
The AX-12A servo actuator from ROBOTIS is the most advanced actuator on the market in its price range. This servo has become the defacto standard for the next generation of educational robotics. AX-12A robot servos have the ability to track and report their speed, temperature, voltage, load, and shaft position. The control algorithm used to maintain shaft position on the AX-12 actuator can be adjusted individually for each servo, allowing you to control the speed and strength of the motor's response. All of the sensor management and position control is handled by the servo's built-in microcontroller - this distributed approach leaves your main controller free to perform other functions.
The HR-OS1's is in beta, but available for download, printing, and customization at the (free registration is required for file download from shapeways). You can order your own frames directly from shapeways in a variety of materials types and colors, allowing you to cusotmize your HR-OS1. You can further customize your robot by modifying our provided samples or creating your own designs. When your done you can share and mix up design ideas with other users
Please keep in mind that support of 3D printed outer shells is still in beta phase as maximum payload limits have not been established and are subject to change.
| Humanoid Specification | ||
| Height (No Shell) | 43cm / 17 inches | |
| Weight (No Shell) | 1.85kg/ 4.1 lbs | |
| DOF | 20 | |
| Actuators | 20 AX-12A | |
| Sensors | Gyro, Accelerometer | |
| Processor | Intel Edison | |
| Sub Controller | Arbotix PRO | |
| Wireless Control Options | Xbee, Wifi, Bluetooth | |
| Battery | 3 cell 11.1V 2000 mAh LiPo | |
| OS | Yocto OpenEmbedded Linux | |
| Code | Open Source C++ framework based on the DARwin-OP software with integrated REST based API | |
| Frame | 5052 Aluminum Metal Brackets | |
| Body Panels | 3D printed Nylon | |
- - Recommended Command Line Interface
- - Optional GUI interface (Windows Only)
- This is the best place to put your questions, comments, and results with the HR-OS1. After you've please us your username so we can upgrade your account.
- This is a great way to get a hold of us for typos and smaller errata, or if you have any specific questions about your order.
Price: $10.99
Price: $80.00
Price: $25.75
Price: $45.00
+ General Reviews 
Public cad repository for non-electronic hardware
Public cad repository for electronic hardware
Public code repository
Assembly instructions
Bill of materials
Contributing guide
Link github
