Ng.uavp
|
|
ng.uavp Basic Data Category: Projekte URL (first publication): https://ng.uavp.ch/FrontPage
Project status:
Technical documentation Maturity of the project:
no no
Other
Assembly instructions are editable: Bill of materials is editable: Design files are in original format: No Free redistribution is allowed licence: No
Project management
Open-o-meter: 0 Product category: Toys & Games Contains original non-electronic hardware: Contains original electronic hardware: Contains original software: |


Inhaltsverzeichnis
- 1 Description
- 1.1 Navigation
- 1.2 Recent
- 1.3 This Page
- 1.4 User
- 1.5 Welcome to the Open Source Next Generation Multicopter
- 1.5.1 UAVP-NG Hardware 0.30-r1 & 0.30-mini-r1
- 1.5.2 UAVP-NG Hardware 0.24-mini
- 1.5.3 UAVP-NG Quad Brushless Controller NGblc-4mini
- 1.5.4 UAVP-NG Hardware 0.22-mini
- 1.5.5 UAVP-NG Hardware 0.22
- 1.5.6 UAVP-NG Copter Software
- 1.5.7 UAVP-NG Ground Control
- 1.5.8 Get your own
- 1.5.9 Sidenote
- 1.5.10 Events
- 1.5.11 News
- 1.5.12 Highlights
- 1.5.13 The Evolution of NGOS
- 1.5.14 Vertikal launch with higher speed on 02.11.2015
- 1.5.15 Autumn impression on 23.10.2015
- 1.5.16 Flight with gimbal during pretty hard wind on 11.10.2015
- 1.5.17 Mountain Top again
- 1.5.18 Spring Moves April 2014
- 1.5.19 Gipfelstürmer
- 1.5.20 NG on the Alp
- 1.5.21 Autumn Mountains
- 1.5.22 Fun Flying October 2013
- 1.5.23 Fun Flying October 2013
- 1.5.24 Grass Cutting and the village Immighausen from above
- 1.5.25 Flight through two cow sheds
- 1.5.26 FPV flight around a straw stack
- 1.5.27 Flight through the ruin of monastry Schaaken
- 1.5.28 DarkRiver flies some NG-UAVP Loopings with the new heading hold algorithm on the 04.08.2012
- 1.5.29 Ralf's aerial movie: NG-UAVP from above
- 1.5.30 Taarek's first pirouettes on the 28.06.2011
- 1.5.31 5. NG Developer Meeting in Heidelberg on the 27th / 28th / 29th of May 2011
- 1.5.32 UAVP-NG at 27c3, the 27th Chaos Computer Club Congress in Berlin on the 27.12.2010
- 1.5.33 Ygramul's NG FPV impressions on the 22.08.2010
- 1.5.34 Other language
- 1.5.35 BitCoin Donations
- 2 + General Reviews
Description
Recent
This Page
User
Welcome to the Open Source Next Generation Multicopter
This is a community-driven open source project to build a modern autonomously flying Multicopter. The abbreviation UAVP stands for "Universal Aerial Video Platform". It is a flying object, ideally suited for making aerial videos and photos (aerial photography), but is also a lot of fun to fly whether indoors or outdoors.
Note
Please be aware that the and the are completely separate projects with different developers and different philosophy. The NG has a new, very different software and hardware design
Note
MoinMoin Wiki SPAM increased in the last months and we had to close down new account creation to counter that. Currently only NG Developers are able to create new accounts for you Please join us on IRC and ask for an account if you would like to have write access to this Wiki.
UAVP-NG Hardware 0.30-r1 & 0.30-mini-r1
The new UAVP-NG hardware and are finally available for everyone in our non-profit .
Amongst many feature upgrades, the most important difference to the HW0.1x/HW0.2x series is the switch from our trusty old ARM7 based LPC2148 to the more contemporary STM32F4 (Cortex M4) MCU running at 168Mhz with floating point support.
We also worked hard to reorganize our source code base to reflect those changes and improving the portability. We will continue to support both platforms, but the new MCUs will give us the resources to move forward.
The HW0.30 and HW0.30-mini represent the two form-factors we used previously for the HW0.2x and HW0.2x-mini, each with a different focus on features and use cases. For the full-sized HW0.30-r1 we chose a Dual-MCU architecture that offers the possibility to split tasks between an "FC" - MCU handling the flight-critical tasks and a "User" - MCU where for example higher-order control functions or application specific tasks can be implemented. Both MCUs are interconnected via a 32kB dual-port RAM for real-time access. Both form factors feature a lot more interfaces for connectivity compared to the HW0.2x series, all of which will be described in detail here.
UAVP-NG Hardware 0.24-mini
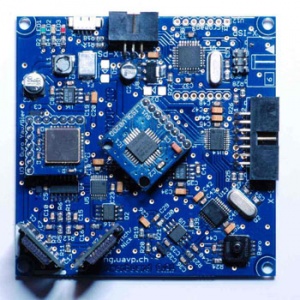
The new UAVP-NG Hardware 0.24-mini consists of one PCB of 5.5cm x 5.5cm in 4 layer called the flight controller board (FC). It contains the 32bit LPC2148 main CPU. The peripherial CPU called RC/Cam-Controller (RCC) is located on a separate small PCB which can be optionally attached to the FC. Additionally it comes with PCBs for the GPS antenna, a JTAG adapter, a push button PCB, an external compass PCB and as mentioned before, the PCB for the RCC.
UAVP Mini-NG HW-0.24-mini PCB fully assembled (top)
This is a feature enhanced miniaturized version of the Hardware 0.22-mini. The LPC2148 is directly soldered to the FC and the FC contains all the digital sensors needed for stabilizing the UAVP-NG and making it easier to fly than other model-helicopters. The flight-controlboard processes the sensor and remote-control data and sends commands to the motors.
The PCB's are designed to contain any features that anybody could want on a multicopter:
- 1 main CPU (LPC2148) plus 1 peripherial CPUs (Atmel ATmega644P) on a separate PCB
- 3D gyroscope (MPU6000), two 3D accelerometer (MPU6000 + LIS3LV02DQ)
- A barometer (MS5611B)
- A compass (HMC5883L) and a Venus GPS
- Two AD inputs for distance sensors (Sharp IR) and similar
- A sum-signal and 4 serial inputs for several remote-control receivers, GPS and Consoles
- outputs for up to 16 motors and 5 Servos
much more, see
They are optimized for size, weight, features and extensibility, not for easy soldering.
UAVP-NG Quad Brushless Controller NGblc-4mini
The new UAVP-NG Quad Brushless Controller for Mini-NGs and normal NGs consists of one PCB of 80mm x 80mm which can be broken down 12. Next Generation Multicopter Meeting in Heidelberg to 55mm x 55mm for use on Mini-NGs. It supports up to 30A peak per channel.
UAVP NGblc-4mini PCB fully assembled (80mm, top) |
UAVP NGblc-4mini PCB fully assembled (55mm, top) |
UAVP-NG Hardware 0.22-mini
The UAVP-NG Hardware 0.22-mini consists of one PCB of 5.5cm x 5.5cm in 4 layer called the flight controller board (FC). It contains the 32bit LPC2148 main CPU. The peripherial CPU called RC/Cam-Controller (RCC) is located on a separate small PCB which can be optionally attached to the FC. Additionally it comes with PCBs for the 3 gyros, a JTAG adapter and as mentioned before, the PCB for the RCC.
Hardware HW-0.22-mini | Size comparision NG (HW-0.22) / Mini-NG (HW-0.22-mini) |
This is a feature compatible miniaturized version of the Hardware 0.22. The LPC2148 is directly soldered to the FC and the FC contains all the sensors needed for stabilizing the UAVP-NG and making it easier to fly than other model-helicopters. The flight-controlboard processes the sensor and remote-control data and sends commands to the motors.
The PCB's are designed to contain any features that anybody could want on a multicopter:
- 1 main CPU (LPC2148) plus 1 peripherial CPUs (Atmel ATmega644P) on a separate PCB
- 3 gyroscopes, a 3D accelerometer, a barometer
- A sum-signal and 4 serial inputs for several remote-control receivers, GPS and Consoles
- outputs for up to 16 motors and 5 Servos
much more, see
They are optimized for size, weight, features and extensibility, not for easy soldering.
UAVP-NG Hardware 0.22
The UAVP-NG Hardware 0.22 consists of two PCBs, the flight-controller board (FC) and the sensor board (SB). Both contain a peripherial CPU called RC-Controller (RCC) and SB-Controller (SBC).
Hardware HW-0.22 (backside) | Hardware HW-0.22 (frontside) |
The main CPU, an LPC2148, is attached to the Flight-Controller board. The sensor board contains all the sensors needed (and some more ) for stabilizing the UAVP-NG and making it easier to fly than other model-helicopters. The flight-controlboard processes the sensor and remote-control data and sends commands to the motors.
Hardware HW-0.22 Flight Control | Hardware HW-0.22 Sensor Board |
The PCB's are designed to contain any features that anybody could want on a multicopter:
- 3 gyroscopes, a 3D accelerometer, a 3D compass, a barometer and thermometer
- A sum-signal and 5 serial inputs for several remote-control receivers, GPS and Consoles
- outputs for up to 16 motors and 5 Servos
much more, see
They are not optimized for size, weight or costs, but for features, extensibility and for easy soldering.
UAVP-NG Copter Software
The UAVP-NG Software, called , is running on a LPC2148 ARM7 CPU on the flight-control board. It is a modular framework with a Hardware Abstraction Layer (HAL) to use the same on control algorithms on different Hardware (like Quadcopters, Hexacopters, Oktocopters, in different configurations). The (flight-control algorithms) are modular too, it is even possible to change the used Controller during flight. Customizations can be made through user defined , where behavior actions can be executed on certain behavior conditions (remote-control action, battery low, remote-control reception lost, whatever).
This modularity enables programmers and non-programmers to work on specific parts of the code without need to understand the complete 80'000 lines of code of the main projects.
If you want to contribute, have a look at the . You can get access to the source code, which is available under the , there.
UAVP-NG Ground Control
There are serveral UAVP-NG Ground Station softwares, which all use a library called libng for communication with NGOS. The library contains several communication APIs of which is the newest.
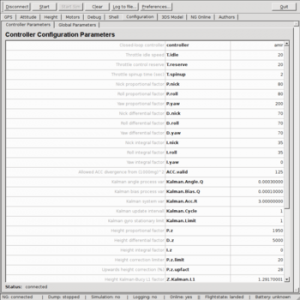
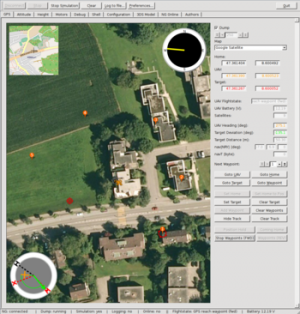
The currently most advanced ground control client is called qngctrl, uses NGCTRL2 and allows visualisation and control of nearly all on-board parameters. The data can be plotted, shown on a map or it can even be used to turn a 3D model.
On the following pictures you see data plots of gyro, acc and angles as well as the NGs position on a Map while GPS and compass have been attached.
The attitude and orientation of the copter can be visualized using an animaled 3D model and nearly all parameters of the NGOS configuration can be inspected and changed.
Get your own
If you want to build a UAVP-NG as well, start with reading trough our starting at the .
You probably should also check our which answers common questions.
This is a community development project and no nice and shiny finished product This means you should at least have an idea how to solder electronic parts on a board or what a microcontroller is and how to flash it.
Sidenote
Having more and more vistors from China we would like make a political statement here:
Free speech to everyone Stop Internet censoring now
We would also like to send our congratulations to Liu Xiaobo, a Chinese dissident who was sentenced to 11 years in prison in December for writing a manifesto calling for freedom of expression and multiparty elections, who won the Nobel Peace Prize Award 2010
Events
The next events sorted by date:
17. UAVP-NG Multicopter Meeting in Heidelberg (Rothenberg), Germany (3 days) | 25.05 - 27.05 |
2. UAVP-NG Race Meeting in Zuerich, Switzerland (3 days) | Doodle |
News
The latest NG News sorted by date:
21.09.2018 | The 19. Multicopter Meeting took place in Freiburg, Germany (3 days) |
18.09.2018 | The HW-0.30-mini target another popular flight control software |
17.08.2018 | The 18. Multicopter Meeting took place in Zurich, Switzerland (3 days) |
25.05.2018 | The 17. Multicopter Meeting took place in Heidelberg, Germany (3 days) |
27.12.2017 | The 34. Chaos Communication Congress 34c3 took place in Leipzig, Germany (4 days) |
14.10.2017 | The 1. UAVP-NG Race Weekend took place in Zurich, Switzerland (3 days) |
04.08.2017 | The SHA 2017 Camp Meeting took place in Scoutinglandgoed, Zeewolde (5 days) |
07.07.2017 | The 16. Multicopter Meeting took place in Zurich, Switzerland (3 days) |
28.04.2017 | The 15. Multicopter Meeting took place in Heidelberg, Germany (3 days) |
27.12.2016 | The 33. Chaos Communication Congress 33c3 took place in Hamburg, Germany (4 days) |
09.09.2016 | The 14. Multicopter Meeting took place in Heidelberg, Germany (3 days) |
14.07.2016 | The 13. Multicopter Meeting took place in Zurich, Switzerland (4 days) |
27.12.2015 | The 32. Chaos Communication Congress 32c3 took place in Hamburg, Germany (4 days) |
29.06.2015 | The new HW-0.30-mini-r1 and HW-0.30-r1 boards are available in the |
18.06.2015 | The 12. Multicopter Meeting took place in Heidelberg on the 18./19./20./21. June 2015 (4 days) |
27.12.2014 | The 31. Chaos Communication Congress 31c3 took place in Hamburg, Germany (4 days) |
13.12.2014 | Successful maidenflight of the new prototype |
23.10.2014 | The first for developers arrived. We hope to get them airborne for 31C3. |
03.06.2014 | The 11. Multicopter Meeting took place in Zurich, Switzerland (4 days) |
04.04.2014 | The new arrived. |
19.01.2014 | Successful maidenflight of the new prototype |
29.12.2013 | of NGOS-0.68 under GPLv3. To contribute, please check the page |
27.12.2013 | The 30. Chaos Communication Congress 30c3 took place in Hamburg, Germany (4 days) |
24.10.2013 | The first for developers arrived. We hope to get them airborne for 30C3. |
11.10.2013 | The new Wi.232-NG wireless breakout boards with Picoblade plugs are available in the |
26.07.2013 | The 10. Multicopter Meeting took place in Grünstadt, Germany (3 days) |
09.05.2013 | The 9. Multicopter Meeting took place in Zuerich, Switzerland (4 days) |
13.01.2013 | of NGOS-0.67 under GPLv3. To contribute, please check the page |
06.01.2013 | of NGOS-0.66 under GPLv3. To contribute, please check the page |
27.12.2012 | The 29. Chaos Communication Congress 29c3 took place in Hamburg, Germany (4 days) |
17.12.2012 | The new HW-0.24-mini-r1 boards and the new NGblc-r2 are available in the |
10.11.2012 | Christi succeeds in doing a maidenflight with HW-0.24-mini-r0 |
15.09.2012 | The 8. Multicopter Meeting took place in Zuerich, Switzerland (3 days) |
25.05.2012 | The 7. Multicopter Meeting took place in Heidelberg on the 25./26./27./28. May 2012 (4 days) |
01.05.2012 | The Next Generation Multicopter in the press: |
15.04.2012 | of NGOS-0.65 under GPLv3. To contribute, please check the page |
30.12.2011 | Our new HW-0.23-mini-r0 with MPU6000, HMC5883L Compass, MBS5607B Altimeter did a successful maidenflight. |
21.12.2011 | of NGOS-0.64 under GPLv3. To contribute, please check the page |
24.11.2011 | |
10.10.2011 | of NGOS-0.63 under GPLv3. To contribute, please check the page |
02.10.2011 | of DarkRiver's Mini-NG at 6. Developer Meeting Zürich (CH) |
14.08.2011 | - UAVP-NG from above |
12.08.2011 | The in the german Tagesschau |
11.08.2011 | - UAVP-NG from the top |
11.08.2011 | - First on-board video online |
28.06.2011 | Taarek with Amir's Mini-NG using NGOS-0.63 with HW-0.22-mini |
04.06.2011 | of NGOS-0.62 under GPLv3. To contribute, please check the page |
01.06.2011 | A first movie of the on the 27./28./29. May 2011 |
12.05.2011 | Maidenflight of Jan's NG with NGOS-0.61 with HW-0.22 |
05.05.2011 | Maidenflight of Ralf's Mini-NG using the new PCBs and NGOS-0.62 with HW-0.22-mini |
01.05.2011 | |
21.04.2011 | The UAVP-NG offers the new Mini-NG, called HW-0.22-mini |
20.04.2011 | Maidenflight of Dracos's Mini-NG using the new PCBs and NGOS-0.61 with HW-0.22-mini |
19.04.2011 | Maidenflight of Andi's NG using NGOS-0.61 with HW-0.22 |
10.02.2011 | New 5.8GHz NG-Video TX/RX PCBs and NG Centerplates are now available in the |
24.01.2011 | Our new opens it's doors Go and get your |
06.01.2011 | The Next Generation Multicopter in the press: (the real article) |
30.12.2010 | of our source code under GPLv3. To contribute, please check the page |
27.12.2010 | UAVP-NG on TV: news coverage of 27c3 and the new Mini-NG prototype |
There is also more .
Highlights
The Evolution of NGOS
- The Evolution of NGOS as seen from the RCS development system:
Gehe zur dieses Films.
Vertikal launch with higher speed on 02.11.2015
Go to
Autumn impression on 23.10.2015
Go to
Flight with gimbal during pretty hard wind on 11.10.2015
Go to
Mountain Top again
- NG at Vodelsang (Bayrischzell)
Gehe zur dieses Films.
Spring Moves April 2014
- Spring Moves
Gehe zur dieses Films.
Gipfelstürmer
- Gipfelstürmer
Gehe zur dieses Films.
NG on the Alp
- NG on the Alp
Gehe zur dieses Films.
Autumn Mountains
- Autumn Mountains
Gehe zur dieses Films.
Fun Flying October 2013
- NG Tricks
Gehe zur dieses Films.
Fun Flying October 2013
- NG Cruising
Gehe zur dieses Films.
Ranveli, Maldives 13.10.2012
These pictures were made with a Go Pro Hero 2 at on the Ranveli Island on the Maldives. It is a beautiful place for diving and photography
Grass Cutting and the village Immighausen from above
Go to
Flight through two cow sheds
Go to
FPV flight around a straw stack
Go to
Flight through the ruin of monastry Schaaken
Go to
DarkRiver flies some NG-UAVP Loopings with the new heading hold algorithm on the 04.08.2012
The new heading hold algorithm will be in release 0.66.
To of this Video.
Ralf's aerial movie: NG-UAVP from above
Go to of this video.
Taarek's first pirouettes on the 28.06.2011
Go to
Go to of this video.
5. NG Developer Meeting in Heidelberg on the 27th / 28th / 29th of May 2011
Go to of this video.
UAVP-NG at 27c3, the 27th Chaos Computer Club Congress in Berlin on the 27.12.2010
The quadcopter visible at the beginning of the movie is a prototype of our new UAVP-NG Mini It did it's maidenflight at 27c3.
Go to of this video.
Ygramul's NG FPV impressions on the 22.08.2010
Thrust/Weight is still at about 2/1. Used amir-ng controller and quadX hal.
For more information see in the NG Forum.
Go to of this video.
Other language
Please note that there is a german Frontpage: .
BitCoin Donations
If you would like to donate to the project use the following address to send your BTC to:
1HQMMR98ofevuE4U5dBNPPDxJPEoujhtau
FrontPage (last edited 2018-03-18 10:02:32 by )
+ General Reviews 
Public cad repository for non-electronic hardware
Public cad repository for electronic hardware
Public code repository
Assembly instructions
Bill of materials
Link media wiki
