Multiplo
|
|
Multiplo Basic Data Category: Robotics URL (first publication): https://github.com/multiplo
Project status:
Technical documentation Maturity of the project:
no no
Other
Assembly instructions are editable: Bill of materials is editable: Design files are in original format: No Free redistribution is allowed licence: No
Project management
Open-o-meter: 0 Product category: Toys & Games Contains original non-electronic hardware: Contains original electronic hardware: Contains original software: |

Description
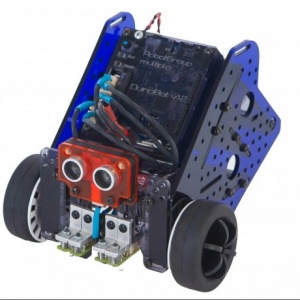
Building a robot is like building any other thing. You just need to have an idea from your imagination, and the courage to build it. And, of course, patience. But things are much harder if you don’t have any standard method of construction. That’s why we develop Multiplo as an integration of different disciplines, so that you don’t have any difficulties neither with the mechanics nor with the electronics. And so, you can focus in the process of creation.
The mechanics of Multiplo is based on a mathematical system that keeps proportions of growth in each axis, allowing robots to be 3-D. The design concept is that all the parts should be available “off-the-shelf” and ready to be customized by experienced users. That’s why we laser cut and we use standard M3 bolts.
The mathematical relationship is based on a system of 3mm. All thicknesses in materials are 3mm and all screws diameter are M3. All holes are 3mm and all distances between holes are 3x3mm = 9mm. This allows all holes to be coincident when you mount different parts between each other. But even more, it allows users to easily reproduce the parts with simple tools.
The most important aspect of building with Multiplo is that all resources are shared in an open source philosophy. Anyone can download the blueprints, modify them and cut his/her own pieces. You just need to use a sheet of 3mm thickness and a bit of imagination.
We use for these tutorials materials like acrylic and ABS laser cut. But you can use 3D printer or cut with a sharp razor fiberboard (a.k.a. MDF). This way you can use from aluminum for heavy duty robots to lightweight plastic for quadcopters.
+ General Reviews 
Public cad repository for non-electronic hardware
Public cad repository for electronic hardware
Public code repository
Assembly instructions
Bill of materials
Link github
